前言:國產靈巧手再升級,重構機器人觸感邊界。
具身智能的聚光燈依舊灼目,靈巧手也已從技術幕后走向產業臺前。
作為人形機器人圈子里的焦點項目之一,特斯拉Optimus的2025年量產計劃一直在調整。據多家媒體援引知情人士透露,當前特斯拉正面臨機器人“手部”核心部件的研發瓶頸,需調動核心資源攻堅關鍵設計缺陷。
馬斯克本人也在今年9月的一次播客訪談中直言,“包含前臂在內的手部系統,是整臺機器人工程化落地的最大技術難點。”
事實上,在人形機器人與具身智能飛速發展的當下,靈巧手早已不是簡單的執行部件,而是機器人實現環境交互與任務執行的核心終端,其技術突破直接決定機器人商業化落地進程,更是人形機器產業鏈的關鍵環節。尤其在觸覺感知層面,如何精準復刻人手細膩的觸感反饋與力控精度,更是長期橫亙在靈巧手技術領域的一座大山。
正當行業目光聚焦于靈巧手技術攻堅之際,來自杭州“六小龍”陣營的強腦科技,近期推出了Revo 2仿生靈巧手觸覺版本。
該產品不僅承襲了其前代靈巧手在輕量化設計、高負載比上的行業領先優勢,更以“重構觸覺邊界”為核心研發理念,將多維度觸覺感知能力深度融入仿生機械結構設計,為醫療、精密制造等對操作精度要求嚴苛的領域,帶來了具備革命性意義的智能操作解決方案。
破局不可能三角,觸覺缺失成行業核心瓶頸
靈巧手的發展始終面臨著“不可能三角”困境——如何在重量、負載與感知精度之間找到最優平衡點。隨著工業自動化向精密化、柔性化升級,單純的力量輸出與運動速度已無法滿足復雜場景需求,觸覺感知的缺失成為制約技術突破的關鍵。
傳統靈巧手多依賴視覺導航與預設程序,面對易滑、脆弱或材質多樣的物體時,往往顯得“笨拙”。例如在抓取脆弱物品時,過大力道會導致破碎,力度不足則會滑落,而在辨別不同材質的物品時,更是無從下手,難以判斷。
觸覺感知技術的缺失,使得機械手始終無法真正實現“類人”的操作體驗,這也成為制約其從工業場景向高端制造、醫療科研等領域滲透的關鍵障礙。
正是精準洞察這一行業痛點,強腦科技憑借多年在仿生智能手領域的技術積淀,交出了Revo 2仿生靈巧手這一創新答卷。

強腦科技成立于2015年,是中國非侵入式腦機接口領域的領先科技企業,也是首支入選哈佛大學創新實驗室的中國團隊,內地首家腦機接口領域獨角獸企業。公司在智能仿生手等腦機接口產品研發上取得多項技術突破,成功研制全球首款量產直覺控制智能仿生手。
2018年11月,其智能仿生手登上央視《加油!向未來》舞臺,失去右手的女孩林安露戴著智能仿生手與鋼琴家郎朗合作,四手聯彈,假肢的每個手指都能夠單獨分離控制。在此之后,強腦科技與供應鏈伙伴高效配合,不斷對智能仿生手產品進行技術迭代和量產布局。
2020年,這款能夠隨“意念”活動的智能仿生手實現量產,成為全球首款實現直覺神經控制的量產智能義肢。2022年,它獲得美國FDA上市批準。
在此基礎上,強腦科技也將積累多年的仿生結構與控制技術拓展應用至人形機器人領域,2025年4月發布的仿生靈巧手Revo 2已憑借其卓越的整體性能樹立了行業標桿。作為目前最輕的專業級靈巧手,Revo 2整機重量僅383g,相當于6個雞蛋的重量,尺寸與iPhone 16 Pro Max接近(76mm×160mm)。

這一輕量化設計源于強腦科技對仿生結構的深度優化,借鑒人類肌骨骼結構和手指肌腱傳動原理,采用特殊復合材料與模塊化設計,在保證結構強度的同時大幅降低自重,為長時間操作與多設備集成提供了便利。
性能參數上,Revo 2創造了53:1的握重比行業紀錄,整手握力≥50N,單手可承載20KG重物,能夠穩定支撐壺鈴等大負載物體;而在精密操作層面,其亞毫米級精度(0.1mm)可完成微小零件組裝、筆芯絲滑控制等任務,包絡結構設計還原人手張合運動軌跡,能完美貼合曲面物體,實現不同形狀不同材質物體的穩定抓取。

智能控制方面,Revo 2支持遙控操作與人手協同,可完成彈鋼琴等復雜動作,同時兼容485/CANfd/EtherCAT協議,最高1kHz實時控制頻率,開放的SDK(Python/C/C++)更支持Linux/Windows/ROS系統,為開發者提供了廣闊的二次開發空間。
國產企業打出王牌,重塑靈巧手觸感邊界
觸覺作為人類最重要的感官知覺,幾乎承擔了全部人體與物理世界交互的通道,這也包含了人類日常基礎勞動的所有場景。因此,觸覺感知是靈巧手的核心競爭力,也是實現精細操作的關鍵。
強腦科技仿生靈巧手Revo 2觸覺版本的核心突破,在于將“被動執行”的機械手升級為“主動感知”的智能交互終端。
通過仿生學設計將機械手的功能性與藝術性結合,高仿生指紋與精密關節結構實現接近人類手指的靈活度,同時搭載高性能驅動系統,確保力量與速度的平衡,重新定義靈巧手操作邊界。

仔細來看,Revo 2觸覺版本力分辨率達0.01N,在實際應用中,它既能完成0.05ml/滴的微米級滴定操作,又能動態調整抓握力度。


在官方宣傳視頻中,Revo 2觸覺版本先是輕松拿起然后以較大力量捏碎雞蛋,隨即切換為輕柔模式撿起脆弱的蛋殼,整個過程無需人工干預,完全依靠觸覺仿生手的力控自主完成。這種“剛柔并濟”的力控能力,使得靈巧手在處理多形態物體時,具備了堪比人類的操作靈活性。

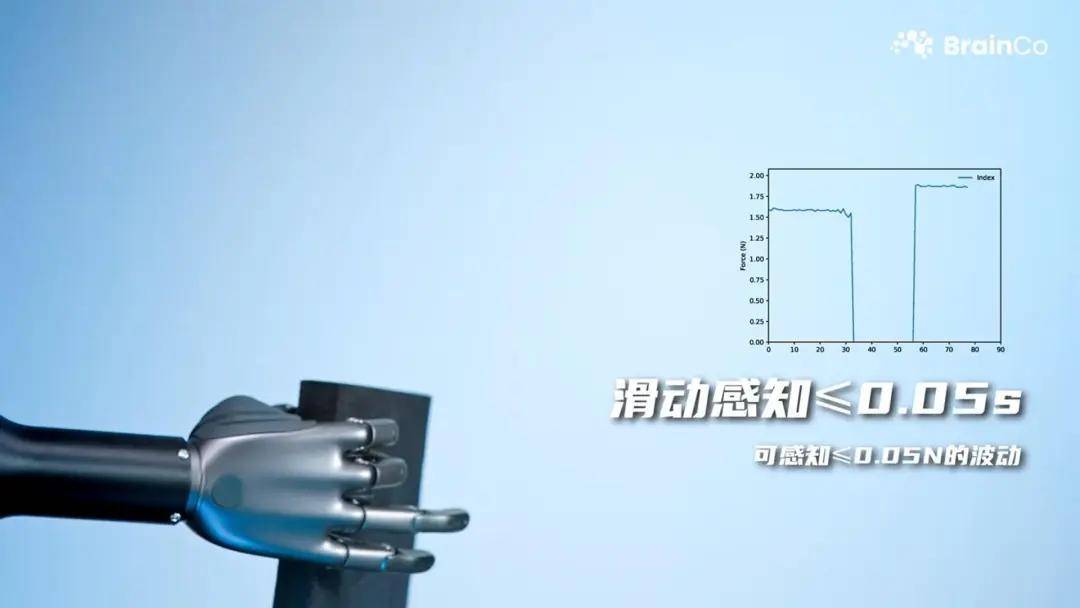
在復雜環境感知方面,Revo 2觸覺版本也實現了三項關鍵突破:其一,滑動感知≤0.05s,可感知≤0.05N的力波動,即使面對快速滑動的物體,也能快速抓握,避免滑落;其二,接觸感知力度≤0.05N,可瞬間感知物體軟硬,通過自適應閉環控制算法,實時調整抓握力度大小,連續拿取不同重量的物體,例如泡沫海綿、木頭方塊等,實現穩定操作;其三,融合多模態觸覺信號分析與智能識別算法,可快速辨別物體材質類別,如金屬、海綿、大理石等30余種物體。

此外,Revo 2的自適應交互系統也將觸覺感知與動作預判相結合,當物體距離手部小于1cm時,即可快速識別接近動作,提前調整關節姿態與抓握準備。
例如在彈奏電子琴時,當琴鍵靠近手指,靈巧手便能自動響應并控制按壓力度,避免因力度過大影響鋼琴音色或力度不足導致音符無法正常發出。這種預判式交互模式,使得人機協作更加自然流暢,大幅提升了彈奏效率與用戶體驗。

Revo 2觸覺版本的技術突破,正在多個領域實現應用。值得注意的是,Revo 2在保持高性能的同時,并未犧牲行業適配性。其輕量化設計便于集成到各類機器人平臺,開放的開發接口與多協議兼容能力,使其能夠快速融入現有工業體系。
結語與未來
根據前瞻產業研究院數據,人形機器人中價值量排名前三的零部件分別是線性執行器、旋轉執行器、靈巧手,價值占比分別為19.64%、19.64%、17.98%,靈巧手也因此被稱為人形機器人的價值高地。隨著人形機器人從實驗室走向商業化量產,作為其“肢體”的關鍵部分,靈巧手也有望迎來規模化放量。
而強腦科技Revo 2靈巧手觸覺版本的發布,不僅是單一產品的升級,更是對整個靈巧手行業發展方向的引領。強腦科技的探索表明,只有突破“感知-決策-執行”的閉環,才能真正實現機械手的類人化升級。未來,隨著觸覺技術與腦機接口、人工智能的深度融合,靈巧手將在更多領域賦能人類,開啟人機協同的新未來。

